Как правило, регистр можно определить как устройство, используемое для хранения двоичных данных, но если вы хотите хранить несколько битов данных, тогда используется набор триггеров, соединенных последовательно. Данные, хранящиеся в регистрах, могут быть сдвинуты с помощью сдвиговых регистров либо с правой, либо с левой стороны путем подачи импульсов CLK. Регистр сдвига это группа шлепки используется для хранения нескольких битов данных. Точно так же сдвиговый регистр с n битами можно сформировать, просто соединив n триггеров, где каждый триггер просто хранит один бит данных. Как только регистр сдвигает биты вправо, это правый сдвиговый регистр, тогда как если он сдвигается влево, то он называется левым сдвиговым регистром. В этой статье обсуждается обзор одного из типов сдвигового регистра, а именно последовательного в параллельном сдвиговом регистре или Сдвиговый регистр SIPO .
Что такое регистр сдвига SIPO?
Сдвиговый регистр, который позволяет осуществлять последовательный ввод и параллельный вывод, известен как сдвиговый регистр SIPO. В регистре SIPO термин SIPO означает последовательный ввод, параллельный вывод. В сдвиговом регистре этого типа входные данные подаются побитно последовательно. Для каждого тактового импульса входные данные на всех ФФ могут сдвигаться на одну позицию. o/p на каждом триггере может быть получен параллельно.
Принципиальная электрическая схема
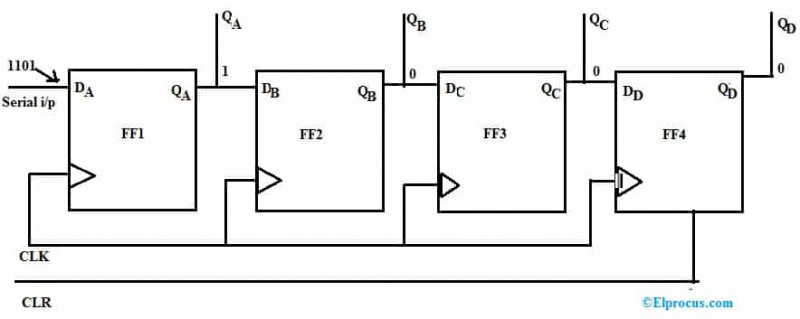
Схема регистра сдвига SISO показано ниже. Эта схема может быть построена с 4 триггерами D, которые подключены, как показано на схеме, где сигнал CLR подается дополнительно к сигналу CLK на все FF o RESET их. В приведенной выше схеме первый выход FF подается на второй вход FF. Все эти четыре D-триггера соединены друг с другом последовательно, потому что на каждый триггер подается один и тот же сигнал CLK.
Работа сдвигового регистра SIPO
Работа сдвигового регистра SIPO; что он принимает последовательные входные данные от первого триггера с левой стороны и генерирует параллельные выходные данные. Схема 4-битного сдвигового регистра SIPO показана ниже. Работа этого сдвигового регистра заключается в том, что сначала все триггеры схемы от FF1 до FF4 должны быть сброшены, чтобы все выходы FF, такие как QA и QD, были на уровне логического нуля, поэтому параллельный вывод данных отсутствует.
Конструкция сдвигового регистра SIPO показана выше. На схеме первый выход триггера «QA» подключен ко второму входу триггера «DB». Выход второго триггера «QB» подключен к третьему входу DC триггера, а третий выход триггера «QC» подключен к четвертому входу триггера «DD». Здесь QA, QB, QC и QD являются выходными данными.
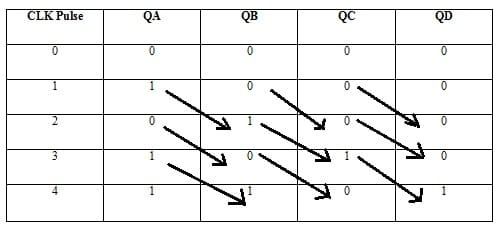
Первоначально все выходные сигналы станут равными нулю, поэтому без импульса CLK; все данные станут равными нулю. Давайте возьмем пример ввода 4-битных данных, например 1101. Если мы применим первый тактовый импульс «1» к первому триггеру, данные, которые должны быть введены в FF и QA, станут «1», а остальные все выходы как QB , QC и QD станут равными нулю. Таким образом, первый вывод данных — «1000».
Если мы применим второй тактовый импульс как «0» к первому триггеру, тогда QA станет «0», QB станет «0», QC станет «0», а QD станет «0». Таким образом, второй вывод данных станет «0100» из-за процесса сдвига вправо.
Если мы применим третий тактовый импульс как «1» к первому триггеру, тогда QA станет «1», QB станет «0», QC станет «1», а QD станет «0». Таким образом, третий вывод данных станет «1011» из-за процесса сдвига вправо.
Если мы применим четвертый тактовый импульс как «1» к первому триггеру, тогда QA станет «1», QB станет «1», QC станет «0», а QD станет «1». Таким образом, третий вывод данных станет «1101» из-за процесса сдвига вправо.
Таблица истинности сдвигового регистра SIPO
Таблица истинности сдвигового регистра SIPO показана ниже.
Временная диаграмма
временная диаграмма сдвигового регистра SIPO показано ниже.
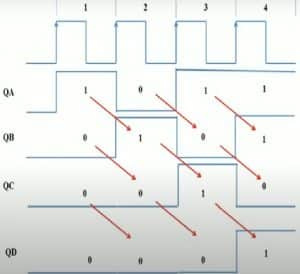
Здесь мы используем положительный фронт сигнала CLK i/p. В первом тактовом импульсе входные данные становятся QA = «1», а все остальные значения, такие как QB, QC и QD, становятся «0». Таким образом, вывод станет «1000». Во втором тактовом импульсе выход станет «0101». В третьем тактовом импульсе выход станет «1010», а в четвертом тактовом импульсе выход станет «1101».
Код Verilog регистра сдвига SIPO
Код Verilog для сдвигового регистра SIPO показан ниже.
модуль sipomod(clk,clear,si,po);
ввод clk, si, очистить;
вывод [3:0] po;
reg [3:0] тмп;
рег [3:0] по;
всегда @(posedge clk)
начинать
если (очистить)
tmp <= 4’b0000;
еще
tmp <= tmp << 1;
tmp[0] <= да;
п = тмп;
конец
конечный модуль
74HC595 IC SIPO Схема регистра сдвига и ее работа
Микросхема 74HC595 представляет собой 8-разрядный последовательный регистр сдвига с параллельным выходом, поэтому она последовательно использует входы и обеспечивает параллельные выходы. Эта микросхема включает 16 контактов и доступна в различных корпусах, таких как SOIC, DIP, TSSOP и SSOP.
Конфигурация выводов 74HC595 показана ниже, где каждый вывод обсуждается ниже.
Контакты с 1 по 7 и 15 (от QB до QH и QA): Это контакты o/p, которые используются для подключения устройств вывода, таких как 7-сегментные дисплеи и светодиоды.
Pin8 (земля): Этот контакт GND просто подключается к контакту GND источника питания или микроконтроллера.
Контакт 9 (QH): Этот вывод используется для подключения к выводу SER другой ИС и подачи одного и того же сигнала CLK на обе ИС, чтобы они работали как одна ИС, включая 16 выходов.
Контакт 16 (Vcc): Этот контакт используется для подключения к микроконтроллеру, в противном случае источник питания, потому что это микросхема логического уровня 5 В.
Контакт 14 (BE): Это вывод Serial i/p, куда последовательно вводятся данные через этот вывод.
Контакт 11 (SRCLK): Это вывод CLK регистра сдвига, который работает как CLK для регистра сдвига, потому что сигнал CLK передается через этот вывод.
Контакт 12 (RCLK): Это вывод Register CLK, который используется для наблюдения за o/ps на устройствах, подключенных к этим микросхемам.
Pin10 (SRCLR): Это вывод CLR регистра сдвига. Этот вывод в основном используется, когда нам нужно очистить хранилище регистра.
Контакт 13 (OE): Это контакт включения o/p. Как только этот вывод установлен в состояние HIGH, регистр сдвига устанавливается в состояние высокого импеданса, и o/ps не передаются. Если мы установим на этом выводе низкий уровень, мы сможем получить o/ps.
ИС 74HC595 работает
Принципиальная схема ИМС 74HC595 для управления светодиодами показана ниже. 3 контакта сдвигового регистра необходимо подключить к Arduino, как и контакты 11, 12 и 14. Все восемь светодиодов будут просто подключены к этой микросхеме сдвигового регистра.
Необходимые компоненты для разработки этой схемы в основном включают в себя микросхему регистра сдвига 74HC595, Arduino UNO, источник питания 5 В, макетную плату, 8 светодиодов, резисторы 1 кОм — 8 и соединительные провода.
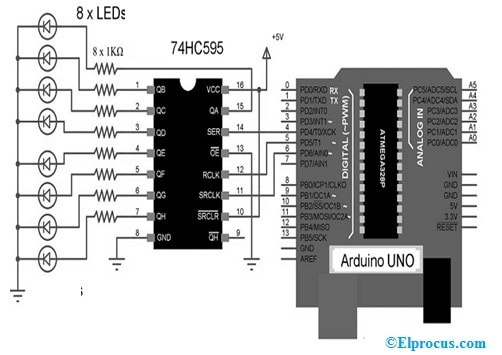
Во-первых, последовательный вывод i/p регистра сдвига необходимо подключить к выводу 4 Arduino Uno. После этого подключите контакты CLK и защелки, такие как контакты 11 и 12 IC, к контактам 5 и 6 Arduino Uno соответственно. Светодиоды подключены с помощью токоограничивающих резисторов 1 кОм к 8-выводным контактам микросхемы. Отдельный источник питания 5 В используется для микросхемы 74HC595 с общим заземлением для Arduino перед подачей 5 В от Arduino.
Код
Простой код для последовательного включения 8 светодиодов показан ниже.
инт защелка = 5;
интклкпин = 6;
инт данныхPin = 4;
байт светодиод = 0;
недействительная установка ()
{
Серийный.начать(9600);
pinMode (защелка, ВЫХОД);
pinMode(dataPin, ВЫХОД);
pinMode (clkPin, ВЫХОД);
}
пустой цикл ()
{
интервал я=0;
светодиод = 0;
сдвигLED();
задержка(500);
для (я = 0; я < 8; я ++)
{
битовый набор (светодиод, я);
Serial.println (светодиод);
сдвигLED();
задержка(500);
}
}
недействительный сдвигLED ()
{
цифровая запись (защелка, НИЗКИЙ);
shiftOut(dataPin, clkPin, MSBFIRST, LED);
цифровая запись (защелка, ВЫСОКИЙ);
}
Работа этой схемы сдвигового регистра заключается в том, что сначала все 8 светодиодов будут выключены, потому что светодиод байтовой переменной установлен на ноль. Теперь каждый бит устанавливается в 1 с помощью функции «bitSet» и сдвигается с помощью функции «shiftOut». Аналогично, каждый светодиод будет включен в той же серии. Если вы хотите выключить светодиод, вы можете использовать функцию «bitClear».
ИС 74HC595 Shift Register используется в различных приложениях, таких как серверы, управление светодиодами, промышленное управление, электронные устройства, сетевые коммутаторы и т. д.
Приложения
применение регистра сдвига с последовательным вводом и параллельным выводом показано ниже.
- Как правило, сдвиговый регистр используется для хранения временных данных, используется как кольцо & Johnson. Кольцевой счетчик .
- Они используются для передачи данных и манипуляций.
- Эти триггеры в основном используются в линиях связи, где необходимо демультиплексирование линии данных на множество параллельных линий, поскольку этот регистр сдвига используется для изменения данных с последовательного на параллельный.
- Они используются для шифрования и дешифрования данных.
- Этот сдвиговый регистр используется в CDMA для генерации PN-кода или псевдошумового порядкового номера.
- Мы можем использовать их для отслеживания наших данных!
- Сдвиговый регистр SIPO используется в различных цифровых приложениях для преобразования данных.
- Иногда этот тип сдвигового регистра просто подключается к микропроцессору, поскольку необходимы дополнительные контакты GPIO.
- Практическое применение этого сдвигового регистра SIPO заключается в передаче выходных данных микропроцессора на индикатор удаленной панели.
Таким образом, это обзор SIPO регистр сдвига - схема, рабочая, таблица истинности и временная диаграмма с приложениями. Наиболее часто используемые компоненты сдвигового регистра SIPO: 74HC595, 74LS164, 74HC164/74164, SN74ALS164A, SN74AHC594, SN74AHC595 и CD4094. Эти регистры очень быстро используются, данные могут быть очень легко преобразованы из последовательных в параллельные, и их конструкция проста. Вот вопрос к вам, что такое сдвиговый регистр PISO.