В современном мире робот будет играть важную роль . Основная цель робота - уменьшить человеческую силу. Роботы используются в электронике во многих приложениях. В этой статье мы обсудили, как построить робота с модулем Arduino и микроконтроллером 8051. Чтобы построить робота с Arduino, мы рассказываем о роботе Arduino с функцией избегания препятствий. Необходимые компоненты включают корпус робота, двигатель постоянного тока, ультразвуковой датчик, модуль Arduino, IC драйвера двигателя и модуль Arduino.
Как построить робота?
В необходимые компоненты для сборки робота необходимо следующее
Тело робота
Базовое тело робота робот обхода препятствий показан на следующем изображении. Корпус робота представляет собой пластиковый корпус с колесами с обеих сторон. Перед корпусом робота расположен ультразвуковой датчик. С помощью ультразвукового датчика препятствие можно обнаружить. Если во время движения робот обнаруживает какое-либо препятствие ультразвуковым датчиком, он отодвигается в сторону и продолжает движение.

Тело робота
Двигатель постоянного тока
В Двигатель постоянного тока - это электродвигатель и работает на электричестве постоянного тока. Работа любого электродвигателя основана на электромагнетизме. Магнитное поле создается проводником с током, когда он помещен во внешнее магнитное поле, он будет испытывать силу, пропорциональную току в проводнике. Как правило, мы знаем, что магниты имеют противоположную полярность притяжения с севера на юг, и если полярности такие же, как с севера на север и с юга на юг, тогда магниты будут отталкиваться.

Двигатель постоянного тока
Внутренняя конфигурация двигателя постоянного тока предназначена для обеспечения магнитного взаимодействия между проводником с током и внешним магнитным полем для создания движения. В этом случае мы используем два двигателя постоянного тока, каждый двигатель содержит 6 В, а всего два двигателя постоянного тока содержат 12 В. Два двигателя постоянного тока помещены в корпус робота, что мы можем наблюдать на следующем изображении. Тело робота перемещается с помощью двигателей постоянного тока.

Корпус робота с двигателем постоянного тока
Модуль Arduino
На следующем изображении показано изображение модуля Arduino. В модуль arduino играет важную роль в проектировании робота для предотвращения препятствий с использованием комплекта arduino. Контакт приемника Arduino подключен ко второму контакту ультразвукового датчика, а 1-й, 2-й и 3-й контакты модуля Arduino подключены к драйверу двигателя постоянного тока. Конденсатор и диод общих компонентов также подключаются к модулю Arduino с помощью батарейного источника питания.

Модуль Arduino
Драйвер двигателя IC
Для запуска двигателя постоянного тока драйвер двигателя IC использовал. Контакты 3,6 и 11, 14 драйвера двигателя подключены к двигателю постоянного тока. Входные контакты 1 и 2 подключены к модулю Arduino, а контакт включения подключен к контакту передатчика Arduino. Контакты 4, 5, 12, 13 драйвера двигателя подключены к массе.

Драйвер двигателя IC
Ультразвуковой датчик
В этой концепции ультразвуковой датчик используется для обнаружения препятствия впереди и отправляет команду на плату Arduino. В зависимости от входного сигнала микроконтроллер перенаправляет робота в разные стороны.

Ультразвуковой датчик
Приложения робота Arduino для предотвращения препятствий
- Робот Arduino может перемещаться по любой поверхности
- Он может перемещаться по металлической поверхности, например по корпусу холодильника.
На изображении ниже показан робот Arduino для предотвращения препятствий.

Робот Arduino для обхода препятствий
Чтобы построить робота с микроконтроллер 8051 мы рассказываем о машине-металлоискателе-роботе. Компоненты, необходимые для сборки робота с микроконтроллером 8051:
- 8051 микроконтроллер
- Двигатели постоянного тока
- Драйверы двигателей
- Металлоискатель
- Декодер
- Кодировщик
- Нажмите на кнопки
- Кристалл
- РЧ передатчик и приемник
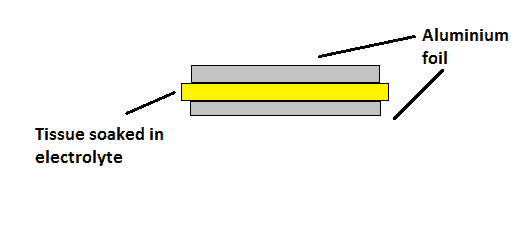
Металлоискатель
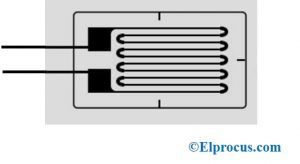
В металлоискатель представляет собой катушку, в которой есть одна или несколько металлических катушек, используемых для обнаружения металлов на земле. Металлоискатель работает по принципу электромагнитной индукции. Металлоискатель подключен к корпусу робота через печатную плату, которую мы можем наблюдать на последнем изображении. На следующем изображении показан общий металлоискатель, используемый в электронных проектах.

Металлоискатель
Нажмите на кнопки
Кнопки - это кнопки, изготовленные из твердых металлов, таких как пластик и металл. Обычно кнопки используются для сброса программы в микроконтроллере. На следующем изображении показано изображение кнопки.

Нажать кнопку
8051 микроконтроллер
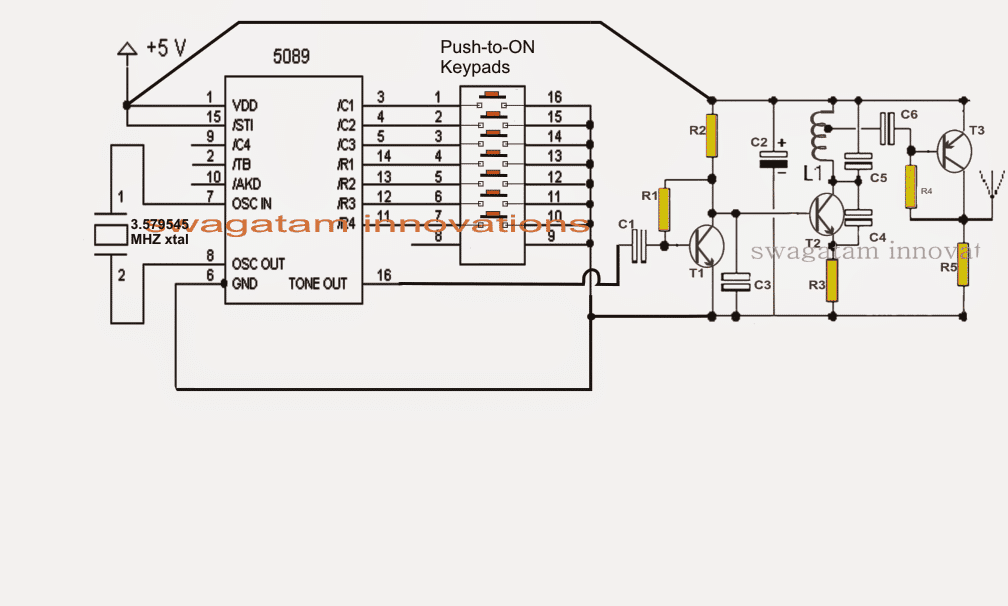
В Микроконтроллер 8051 состоит из 40 контактов . 4-й и 5-й контакты микроконтроллера подключены к кварцевому генератору. Вывод Vcc подключается к источнику питания 5 В, а вывод заземления соединяется с землей. Контакты 15, 16, 18, 19 микроконтроллера подключены к IC кодировщика HT12E. Выводы микроконтроллера 2, 7, 8, 9 подключены к кнопкам.
Следующее изображение после подключения всех компонентов, таких как резистор, конденсатор, кварцевый генератор, микроконтроллер серии 8051, энкодеры и т. Д., Включены печатная плата .

Соединения печатной платы
На изображении ниже показан робот-металлоискатель с микроконтроллером серии 8051.

Робот-металлоискатель с микроконтроллером серии 8051
В этой статье мы обсудили Как построить робота с Arduino и микроконтроллером 8051 . Я надеюсь, что, прочитав эту статью, вы получили базовые знания по созданию робота. Если у вас есть какие-либо вопросы об этой статье или об электронике и коммуникационные проекты , пожалуйста, оставляйте комментарии в разделе ниже. Вот вопрос к вам, Что такое микроконтроллер серии 8051?
.