А серводвигатель или сервопривод — это один из типов электродвигателя, используемый для вращения деталей машины с высокой точностью. Этот двигатель включает в себя схему управления, которая обеспечивает обратную связь о текущем положении вала двигателя, поэтому эта обратная связь просто позволяет этим двигателям вращаться с высокой точностью. Серводвигатель полезен при вращении объекта на некотором расстоянии или под углом. Этот двигатель подразделяется на два типа серводвигатель переменного тока и серводвигатель постоянного тока. Если серводвигатель использует мощность постоянного тока для работы, то двигатель называется серводвигателем постоянного тока, а если он работает с питанием переменного тока, то он называется серводвигателем переменного тока. В этом учебном пособии представлена краткая информация о Серводвигатель постоянного тока – работа с приложениями.
Что такое серводвигатель постоянного тока?
Серводвигатель, который использует электрический вход постоянного тока для создания механического выхода, такого как положение, скорость или ускорение, называется серводвигателем постоянного тока. точно и очень быстро.

Конструкция и работа серводвигателя постоянного тока
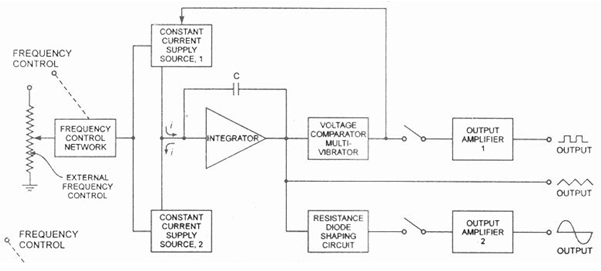
Серводвигатель постоянного тока состоит из различных компонентов, которые показаны на следующей блок-схеме. На этой диаграмме каждый компонент и его функция обсуждаются ниже.

Используемый здесь двигатель представляет собой типичный двигатель постоянного тока, включая обмотку возбуждения, которая возбуждается отдельно. Таким образом, в зависимости от характера возбуждения, их можно разделить на серводвигатели с управлением якорем и полем.
В качестве нагрузки используется простой вентилятор или промышленная нагрузка, которая просто подключается к механическому валу двигателя.
Редуктор в этой конструкции работает как механический преобразователь для изменения выходной мощности двигателя, такой как ускорение, положение или скорость, в зависимости от применения.

Основная функция датчика положения заключается в получении сигнала обратной связи, эквивалентного текущему положению груза. Как правило, это потенциометр, используемый для подачи напряжения, пропорционального абсолютному углу вала двигателя через зубчатую передачу.
Функция компаратора заключается в сравнении выходного сигнала датчика положения и контрольной точки для получения сигнала ошибки и подачи его на усилитель. Если двигатель постоянного тока работает с точным управлением, то ошибки нет. Датчик положения, редуктор и компаратор сделают систему замкнутой.
Функция усилителя заключается в усилении ошибки компаратора и подаче ее на двигатель постоянного тока. Таким образом, он работает как пропорциональный регулятор везде, где усиление усиливается для нулевой установившейся ошибки.
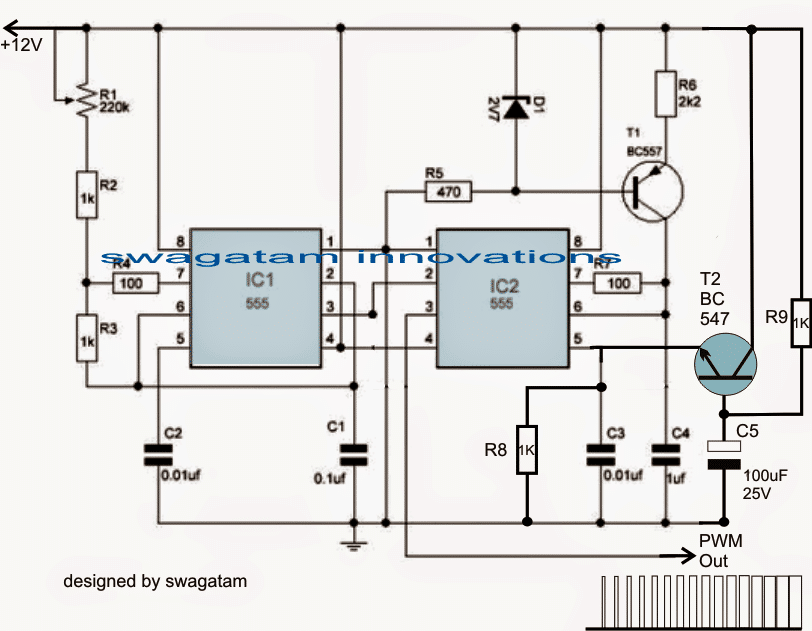
Управляемый сигнал подает вход на ШИМ (широтно-импульсный модулятор) в зависимости от сигнала обратной связи, так что он модулирует вход двигателя для точного управления, в противном случае установившаяся ошибка равна нулю. Кроме того, этот широтно-импульсный модулятор использует опорный сигнал и компаратор для создания импульсов.
Создавая замкнутую систему, можно получить ускорение, скорость или точное положение. Как следует из названия, серводвигатель — это управляемый двигатель, который обеспечивает предпочтительный выходной сигнал благодаря эффекту обратной связи и контроллера. Сигнал ошибки просто усиливается и используется для привода серводвигателя. В зависимости от характера управляющего сигнала и широтно-импульсного модулятора эти двигатели имеют превосходные методы управления с микросхемами FPGA или цифровыми сигнальными процессорами.
Работа серводвигателя постоянного тока; всякий раз, когда входной сигнал подается на двигатель постоянного тока, он вращает вал и шестерни. Таким образом, вращение выходного сигнала шестерни возвращается к датчику положения (потенциометру), ручки которого поворачиваются и изменяют свое сопротивление. Всякий раз, когда сопротивление изменяется, изменяется напряжение, которое является сигналом ошибки, который подается в контроллер, и, следовательно, генерируется ШИМ.
Чтобы узнать больше о типах серводвигателей постоянного тока, перейдите по этой ссылке: Различные типы серводвигателей .
Передаточная функция серводвигателя постоянного тока
Передаточную функцию можно определить как отношение преобразования Лапласа (LT) переменной o/p к LT ( преобразование Лапласа ) переменной i/p. Как правило, двигатель постоянного тока изменяет энергию с электрической на механическую. Подведенная электрическая энергия на клеммах якоря преобразуется в контролируемую механическую энергию.
Передаточная функция серводвигателя постоянного тока, управляемого якорем, показана ниже.

θ(s)/Va(s) = (K1/(Js2 + Bs)*(Las + Ra))/1 + (K1KbKs)/(Js2 + Bs)*(Las+Ra)
Ниже показана передаточная функция серводвигателя постоянного тока с управлением полем.

θ(s)/Vf (s) = Kf / (sLf + Rf) * (s2J + Bs)
Серводвигатель постоянного тока, управляемый якорем, обеспечивает превосходную производительность благодаря замкнутой системе по сравнению с серводвигателем постоянного тока, управляемым полем, который представляет собой систему без обратной связи. Кроме того, скорость отклика в системе управления полем низкая. В случае управления якорем индуктивность якоря незначительна, тогда как в случае управления полем она неодинакова. Но при внутрипромысловом управлении улучшенное демпфирование недостижимо, тогда как при якорном регулировании оно может быть достигнуто.
Характеристики
Серводвигатель постоянного тока имеет следующие рабочие характеристики. Эти спецификации должны быть согласованы в зависимости от нагрузки, необходимой для приложения, чтобы правильно подобрать размер двигателя.
- Скорость вала просто определяет скорость вращения вала, выраженную в RPM (оборотов в минуту).
- Обычно скорость, предлагаемая производителем, представляет собой скорость холостого хода вторичного вала или скорость, при которой выходной крутящий момент двигателя равен нулю.
- Напряжение на клеммах — это расчетное напряжение двигателя, которое определяет скорость двигателя. Эта скорость просто регулируется увеличением или уменьшением напряжения, подаваемого на двигатель.
- Вращающая сила, такая как крутящий момент, создается валом серводвигателя постоянного тока. Таким образом, требуемый крутящий момент для этого двигателя просто определяется характеристикой скорости и крутящего момента различных нагрузок, возникающих в целевом приложении. Эти крутящие моменты бывают двух типов: пусковой крутящий момент и непрерывный крутящий момент.
- Пусковой крутящий момент — это необходимый крутящий момент при запуске серводвигателя. Этот крутящий момент обычно выше по сравнению с постоянным крутящим моментом.
- Непрерывный крутящий момент — это выходной крутящий момент, который представляет собой мощность двигателя в постоянных условиях работы.
- Эти двигатели должны иметь достаточную скорость и крутящий момент для приложения, включая запас от 20 до 30% между потребностями нагрузки, а также номинальные характеристики двигателя, чтобы обеспечить надежность. Когда эти поля превышают слишком много, тогда эффективность затрат будет снижена. Технические характеристики бессердечного серводвигателя постоянного тока 12 В постоянного тока от Faulhaber находятся:
- Передаточное число коробки передач составляет 64: l Планетарная трехступенчатая коробка передач.
- Ток нагрузки 1400 мА Мощность.
- Мощность 17Вт.
- Скорость 120 об/мин.
- Ток без нагрузки составляет 75 мА.
- Тип энкодера — оптический.
- Разрешение энкодера составляет 768 CPR вала O/P.
- Диаметр 30мм.
- Длина 42 мм.
- Общая длина 85 мм.
- Диаметр вала 6мм.
- Длина вала 35мм.
- Крутящий момент 52 кгсм.
Характеристики
характеристики серводвигателя постоянного тока включая следующее.
- Конструкция серводвигателя постоянного тока аналогична двигателю с постоянным магнитом или двигателю постоянного тока с независимым возбуждением.
- Регулирование скорости этого двигателя осуществляется путем управления напряжением якоря.
- Серводвигатель разработан с высоким сопротивлением якоря.
- Он обеспечивает быструю реакцию крутящего момента.
- Ступенчатое изменение напряжения якоря вызывает быстрое изменение скорости двигателя.
Серводвигатель переменного тока против серводвигателя постоянного тока
Разница между серводвигателем постоянного тока и серводвигателем переменного тока заключается в следующем.
|
Серводвигатель переменного тока |
Серводвигатель постоянного тока |
| Один тип серводвигателя, который использует электрический вход переменного тока для создания механического выхода, называется серводвигателем переменного тока. | Один тип серводвигателя, который использует электрический вход постоянного тока для создания механического выхода, называется серводвигателем постоянного тока. |
| Серводвигатель переменного тока обеспечивает низкую выходную мощность. | Серводвигатель постоянного тока обеспечивает высокую выходную мощность. |
| Эти двигатели регулируются для высокоскоростных условий работы. | Эти двигатели регулируются для условий работы на низких скоростях. |
| Эти типы двигателей развивают высокий крутящий момент. | Эти типы двигателей развивают низкий крутящий момент. |
| Работа этого двигателя стабильная, плавная и менее шумная. | Работа этого мотора менее стабильна и шумна. |
| Эти двигатели имеют меньший КПД. | Эти двигатели имеют высокий КПД. |
| У этих моторов меньше проблем со стабильностью. | У этих моторов больше проблем со стабильностью. |
| В этих моторах нет проблемы электронного шума. | В этих моторах проблема электронного шума из-за наличия щеток. |
| Обслуживание этих моторов меньше. | Техническое обслуживание этих двигателей является высоким из-за наличия щеток и коллектора. |
| Они легкие и небольших размеров. | Они тяжелые и большого размера. |
| Эти двигатели подходят для маломощных приложений. | Эти двигатели подходят для приложений с высокой мощностью. |
Взаимодействие серводвигателя постоянного тока с Arduino
Для управления серводвигателем постоянного тока под точным и требуемым углом можно использовать плату Arduino или любой другой микроконтроллер. Эта плата имеет аналоговый выходной сигнал, который генерирует ШИМ-сигнал для поворота серводвигателя на точный угол. Вы также можете изменить угловое положение серводвигателя с помощью потенциометра или кнопок с помощью Arduino.
Серводвигателем также можно управлять с помощью ИК-пульта дистанционного управления, который легко доступен. Этот пульт дистанционного управления полезен для перемещения серводвигателя постоянного тока на определенный угол или линейного увеличения или уменьшения угла двигателя с помощью ИК-пульта дистанционного управления.
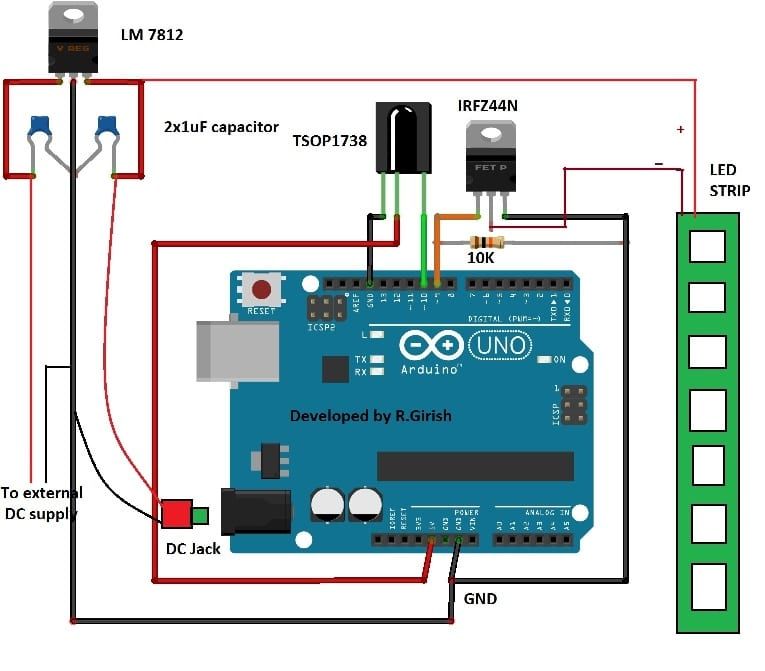
Здесь мы обсудим, как перемещать серводвигатель с помощью ИК-пульта дистанционного управления с помощью Arduino под определенным углом, а также увеличивать или уменьшать угол серводвигателя с помощью пульта дистанционного управления по часовой стрелке и против часовой стрелки. Схема взаимодействия серводвигателя постоянного тока с Arduino и ИК-пультом показана ниже. Соединения этого сопряжения следующие:

Этот интерфейс в основном использует три основных компонента, таких как серводвигатель постоянного тока, плата Arduino и ИК-датчик TSOP1738. Этот датчик имеет три клеммы, такие как Vcc, GND и выход. Клемма Vcc этого датчика подключена к 5 В платы Arduino Uno, клемма GND этого датчика подключена к клемме GND платы Arduino, а выходная клемма подключена к контакту 12 (цифровой вход) платы Arduino.
Цифровой выходной контакт 5 просто подключается к сигнальному входному контакту серводвигателя для управления двигателем.
Контакт +ve серводвигателя постоянного тока подключен к внешнему источнику питания 5 В, а контакт GND серводвигателя подключен к контакту GND Arduino.
Работающий
ИК-пульт используется для выполнения двух действий 30 градусов, 60 градусов и 90 градусов, а также для увеличения/уменьшения угла поворота двигателя от 0 до 180 градусов.
Пульт дистанционного управления содержит множество кнопок, таких как кнопки с цифрами (0-9), кнопки для управления углом, кнопки со стрелками, кнопки вверх/вниз и т. д. При нажатии любой кнопки с цифрой от 1 до 5 серводвигатель постоянного тока переместится к этой точный угол, а когда нажата кнопка угла вверх/вниз, угол двигателя можно точно установить на ± 5 градусов.
После того, как кнопки определены, коды этих кнопок необходимо расшифровать. После нажатия любой кнопки на пульте он отправит один код для выполнения необходимого действия. Для декодирования этих удаленных кодов используется ИК удаленная библиотека из Интернета.
Загрузите следующую программу в Arduino и подключите ИК-датчик. Теперь поднесите пульт к ИК-датчику и нажмите кнопку. После этого откройте последовательный монитор и отслеживайте код нажатой кнопки в виде цифр.
Код Ардуино
#include
#include
Сервисная служба1;
интервал IRpin = 12; // контакт для ИК-датчика
интервал мотор_угол = 0;
IRrecv unrecv(IRpin);
результаты decode_results;
недействительная установка ()
{
Серийный.начать(9600); // инициализируем последовательную связь
Serial.println («Серводвигатель с ИК-пультом дистанционного управления»); // отображаем сообщение
unrecv.enableIRIn(); // Запускаем приемник
серво1.прикрепить(5); // объявить вывод серводвигателя
servo1.write(motor_angle); // переместить двигатель на 0 градусов
Serial.println('Угол серводвигателя 0 градусов');
задержка (2000 г.);
}
пустой цикл ()
{
while(!(irrecv.decode(&results))); // ждем, пока ни одна кнопка не будет нажата
if (irrecv.decode(&results)) // когда нажата кнопка и получен код
{
if(results.value==2210) // проверяем, нажата ли кнопка с цифрой 1
{
Serial.println('угол серводвигателя 30 градусов');
мотор_угол = 30;
servo1.write(motor_angle); // переместить двигатель на 30 градусов
}
else if(results.value==6308) // если нажата кнопка с цифрой 2
{
Serial.println('угол серводвигателя 60 градусов');
мотор_угол = 60;
servo1.write(motor_angle); // перемещаем двигатель на 60 градусов
}
else if(results.value==2215) // аналогично для всех цифровых кнопок
{
Serial.println('угол серводвигателя 90 градусов');
мотор_угол = 90;
servo1.write(motor_angle);
}
иначе если (результаты.значение == 6312)
{
Serial.println('угол серводвигателя 120 градусов');
мотор_угол = 120;
servo1.write(motor_angle);
}
иначе если (результаты.значение == 2219)
{
Serial.println('угол серводвигателя 150 градусов');
мотор_угол = 150;
servo1.write(motor_angle);
}
else if(results.value==6338) // если нажата кнопка увеличения громкости
{
если(угол_двигателя<150) угол_двигателя+=5; // увеличить угол мотора
Serial.print('Угол двигателя');
Serial.println (двигатель_угол);
servo1.write(motor_angle); // и двигаем мотор на этот угол
}
else if(results.value==6292) // если нажата кнопка уменьшения громкости
{
if(motor_angle>0) motor_angle-=5; // уменьшить угол мотора
Serial.print('Угол двигателя');
Serial.println (двигатель_угол);
servo1.write(motor_angle); // и двигаем мотор на этот угол
}
задержка(200); // ждем 0,2 сек.
безрезультатно.резюме(); // снова быть готовым принять следующий код
}
}
Питание серводвигателя постоянного тока подается от внешнего источника 5 В, а питание ИК-датчика и платы Arduino подается от USB. Как только на серводвигатель подается питание, он перемещается на 0 градусов. После этого на последовательном мониторе будет отображаться сообщение «угол серводвигателя равен 0 градусов».
Теперь на пульте, после нажатия кнопки 1, серводвигатель постоянного тока сдвинется на 30 градусов. Точно так же, как только будут нажаты такие кнопки, как 2, 3, 4 или 5, двигатель будет двигаться под желаемыми углами, такими как 60 градусов, 90 градусов, 120 градусов или 150 градусов. Теперь последовательный монитор будет отображать угловое положение серводвигателя как «угол серводвигателя xx градусов».
После нажатия кнопки увеличения громкости угол поворота двигателя увеличится на 5 градусов, что означает, что если он равен 60 градусам, то он сдвинется до 65 градусов. Таким образом, положение нового угла будет отображаться на серийном мониторе.
Аналогичным образом, после нажатия кнопки уменьшения угла угол двигателя уменьшится на 5 градусов, что означает, что если угол равен 90 градусам, он сдвинется до 85 градусов. Сигнал от ИК-пульта воспринимается ИК-датчиком. Чтобы узнать, как он воспринимает и как работает ИК-датчик, нажмите здесь
Таким образом, положение нового угла будет отображаться на серийном мониторе. Таким образом, мы можем легко управлять углом серводвигателя постоянного тока с помощью Arduino и ИК-пульта.
Чтобы узнать, как подключить двигатель постоянного тока к микроконтроллеру 8051, нажмите здесь
Преимущества серводвигателя постоянного тока
Преимущества серводвигателей постоянного тока включая следующее.
- Серводвигатель постоянного тока работает стабильно.
- Эти двигатели имеют гораздо более высокую выходную мощность, чем размер и вес двигателя.
- Когда эти двигатели работают на высоких скоростях, они не производят никакого шума.
- Этот двигатель работает без вибраций и резонансов.
- Эти типы двигателей имеют высокое отношение крутящего момента к моменту инерции и могут очень быстро набирать нагрузку.
- Имеют высокий КПД.
- Дают быстрые ответы.
- Они портативны и легки.
- Возможна работа четырех квадрантов.
- На высоких скоростях они слышны тихо.
недостатки серводвигателей постоянного тока включая следующее.
- Механизм охлаждения серводвигателя постоянного тока неэффективен. Таким образом, этот двигатель быстро загрязняется, если его проветрить.
- Этот двигатель вырабатывает максимальную выходную мощность при более высоком крутящем моменте и нуждается в регулярном редукторе.
- Эти двигатели могут быть повреждены перегрузкой.
- Они имеют сложную конструкцию и нуждаются в кодировщике.
- Эти двигатели нуждаются в настройке для стабилизации контура обратной связи.
- Он требует обслуживания.
Применение серводвигателя постоянного тока
применение серводвигателей постоянного тока включая следующее.
- Серводвигатели постоянного тока используются в станках для резки и формовки металла.
- Они используются для позиционирования антенн, печати, упаковки, деревообработки, текстиля, производства шпагата или веревки, CMM (координатно-измерительных машин), обработки материалов, полировки пола, открывания дверей, координатного стола, медицинского оборудования и прядения пластин.
- Эти двигатели используются в системах управления самолетами, где ограничения по пространству и весу требуют двигателей для обеспечения высокой мощности для каждой единицы объема.
- Они применимы там, где необходим высокий пусковой крутящий момент, например, приводы воздуходувок и вентиляторы.
- Они также используются в основном для робототехники, устройств программирования, электромеханических приводов, станков, контроллеров процессов и т. д.
Таким образом, это обзор постоянного тока серводвигатель - работает с приложениями. Эти серводвигатели используются в различных отраслях промышленности для обеспечения решения многих механических движений. Особенности этих двигателей сделают их очень эффективными и мощными. Вот вопрос для вас, что такое серводвигатель переменного тока?




![Цепи зарядного устройства 12 В [с использованием LM317, LM338, L200, транзисторов]](https://electronics.jf-parede.pt/img/battery-chargers/11/12v-battery-charger-circuits-using-lm317.png)